
活用事例
- 2018/03/26
前回、VPS(Virtual Performance Solution)との連成解析のアップデートについてご紹介しましたが、今回はこれを用いた簡単な事例を御覧いただきたいと思います。
上に計算結果のアニメを表示させていますが、この箱には初速度が与えられています。何も行わなければこのまま並進運動を続けてしまいますが、同時に反力を定義して指定した位置に停止するような制御ロジックを加えています。このモデルを下図に示しました。このロジック内で行っていることは、
1.VPSモデルから箱の座標をpositionSensor1へ入力
2.constant2に入力した位置とfeedback2で比較、その差分に対してpID2に入力したパラメータを用いて反力を計算
3.forceActuator1からVPSモデルへ反力値として返す
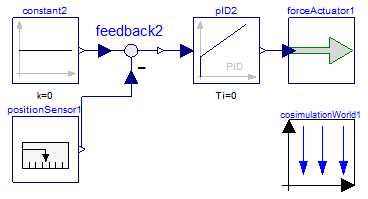
という単純なことで、これにより+側へ行ってしまった時には-側へ、-側へ行ってしまった時には+側へと荷重の入力を繰り返すことで目標となる位置へ徐々に近づけていくというものです。
ここでPID制御を用いていますので、この中のパラメータを変更することで箱の動きを調整することが可能です。
ここで用いていますのはModelica Standard Libraryのエレメントですが、SimulationXで作成したモデルを取り込むことも可能ですので、この様な事例も順次ご紹介していきたいと思います。
興味を持たれた方は右のフォームよりお問い合わせください。