活用事例
- 2020/01/15
機構応力解析MEDYSAでは主に回転体の事象を取り扱います。
ここで問題になってくるのが,回転体を接触させた際にノイズなくスムースに回転するかということです。
従来型の接触アルゴリズムですと離散化された有限要素同士が接触するため多角形同士が接触することになり,回転した際の接触ノイズは回避困難です。
そこでMEDYSAでは回転体表面の接触を出来るだけリアルに表現するための接触アルゴリズムが用意されています。
弊社ではこの接触アルゴリズムを”スムースコンタクト”と呼んでおります。
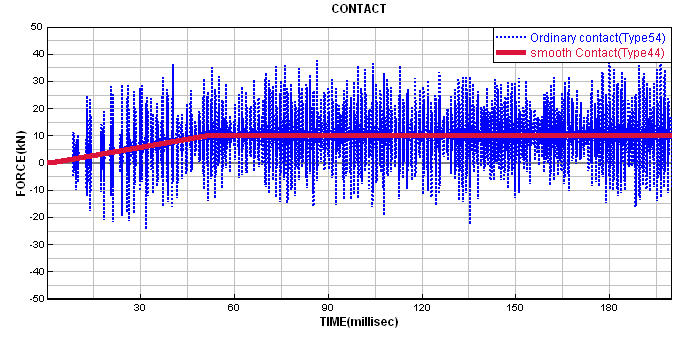
下記動画とグラフをご覧ください。
このモデルでは3000rpmで回転しているシャフトがベアリングに10kNで押し付けられています。グラフはシャフトとベアリング間の接触力の時系列を表しており,青線が従来型の接触アルゴリズム,赤線がスムースコンタクトを使用した結果となります。
結果は一目瞭然,従来型の接触アルゴリズムを使用した接触力にはかなりノイズが乗ってしまっているのに対し,スムースコンタクトを使用した結果はノイズがかなり低減している結果となっております。
スムースコンタクトを使用することで回転体をよりリアルにモデル化出来るという事がお分かり頂けると思います。
次回は”機構応力解析 “MEDYSA“ の特徴 その2”をご紹介予定です。
