活用事例
- 2020/06/23
今回は機構応力解析MEDYSA(3D)と1DシミュレーションツールSimulationXのコラボレーション企画として、1Dシミュレーション連成解析事例(モーター駆動によるロボットアームのPID制御)をご紹介致します。近年、自動車だけでなく航空宇宙、家電、ロボット等の開発には欠かす事の出来ないMBD(モデルベース開発)ですが、1Dシミュレーションと3Dシミュレーションの連成によりシステム間の相互作用などを考慮した、より詳細でリアルな解析が可能になります。
1DシミュレーションツールSimulationXのBlogはこちら
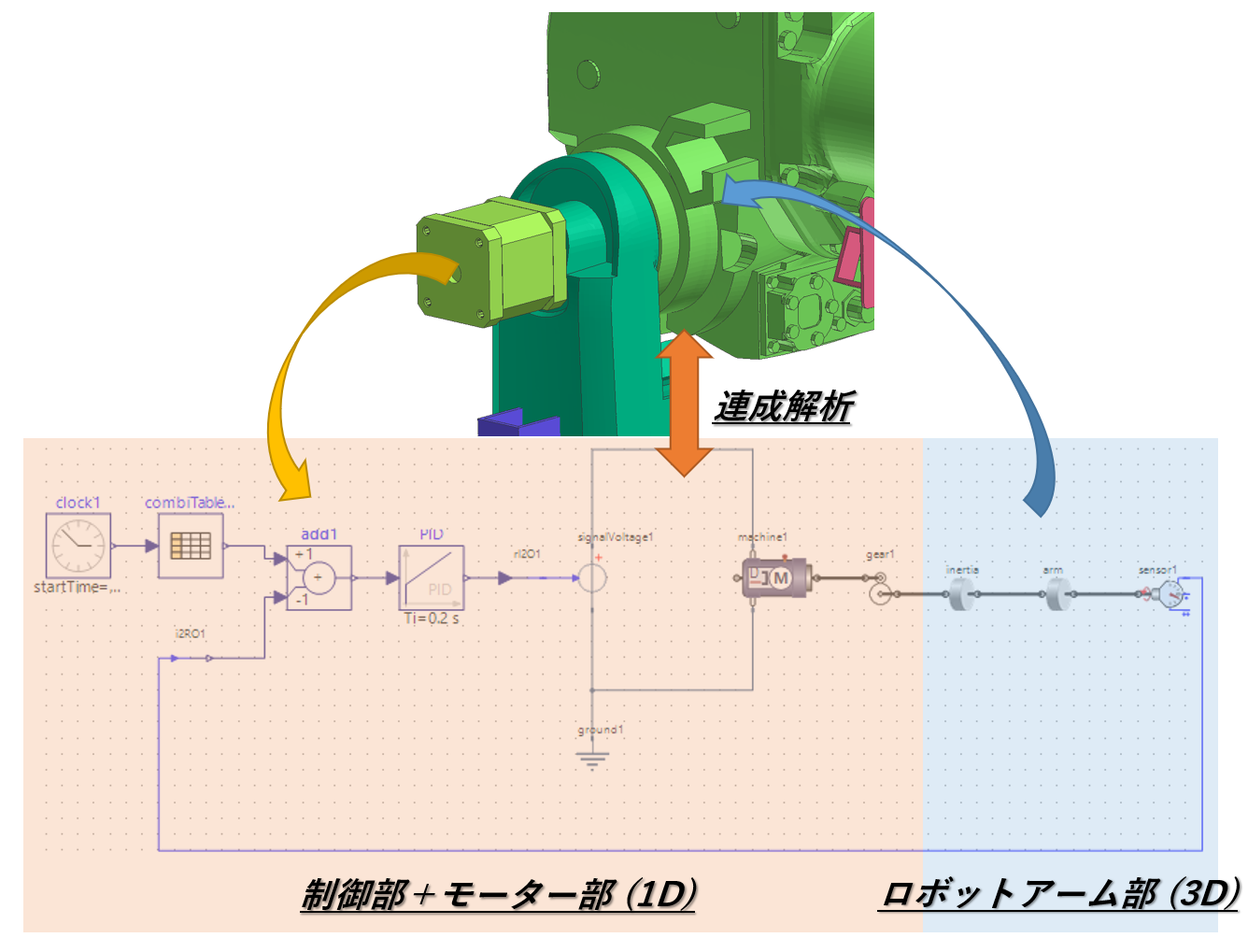
下図はSimulationXにて作成した1Dモデルになります。連成解析においては下図左側の部分(制御部、モーター部)については1Dにてモデル化し、右側の部分(ロボットアーム部)については3D(有限要素)にてモデル化します。
1Dモデル内で計算したモーターからの回転入力を3Dモデルが受け取り、アームが回転します。アームの回転角度を制御パラーメータとして1Dモデル内でPID制御しています。3Dモデルのアーム反力を1Dモデル側へ返すことにより、より現実的な解析モデルとなっています。
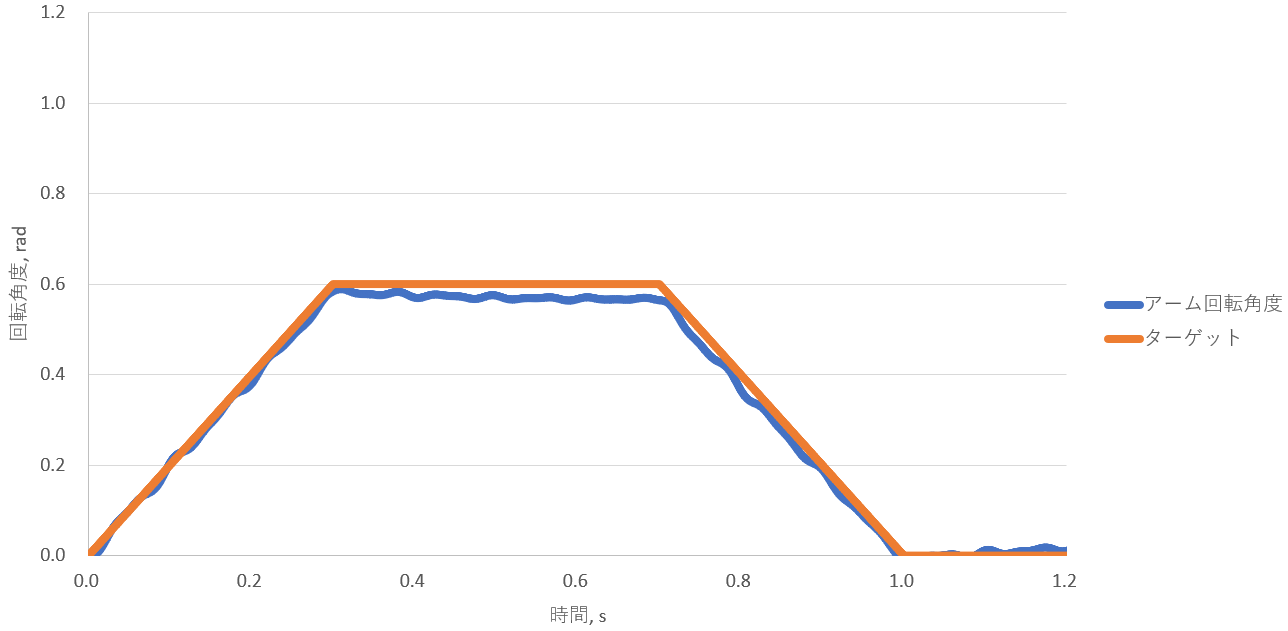
下記が解析結果アニメーションとアームの回転角度グラフになります。目標角度に対し、3Dモデルのアーム角度が追従しているのがご確認頂けるかと思います。
3Dモデルでは弾性体化が可能なため、アーム制御時の応力状態も確認可能です。また、従来の3D解析だけでは確認出来なかった、モータの電流/電圧値も出力可能なため、アーム側に過負荷が発生した際のモーター側の状況も確認可能になります。
今後も1D/3D連成解析事例をご紹介させて頂く予定です。
