

Pro-SiVIC
- 2015/12/22
今回は Pro-SiVIC から コントローラ(MATLAB/Simulink モデル もしくは ECU)へのセンサーデータ出力に関して解説いたします。
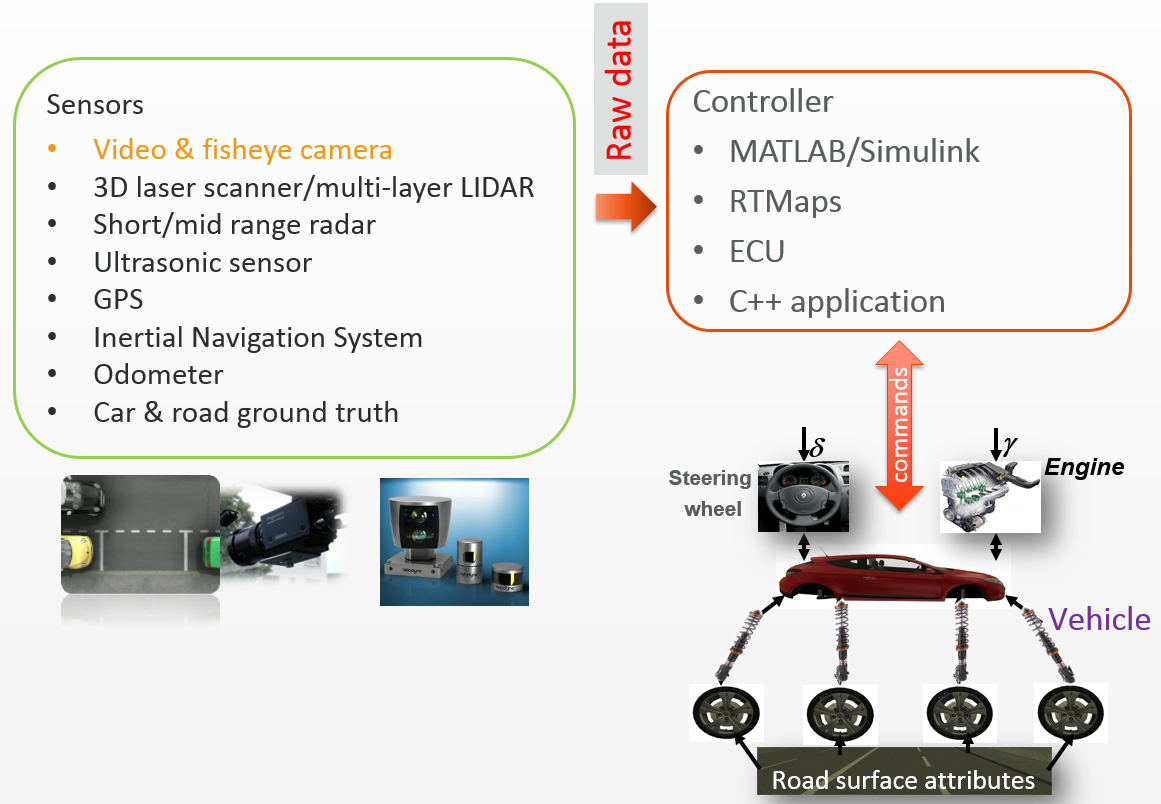
Pro-SiVIC におけるデータフローを以下に示します。

ここで重要なのは,センサーモデルからコントローラに受け渡されるデータはセンサーの生データ(raw data)が渡されるということです。
例えばカメラセンサーモデルからはレンズ/カメラ特性を再現するためのフィルタ適用後のデータが出力されますが,仮想走行環境内をカメラセンサー位置から撮影しただけのデータが含まれます。
走行環境内のオブジェクトの検出,認識といった処理はすべてコントローラ側で行うべき処理となります。
また,コントローラからの車両に対してステアリングを切る,ブレーキを踏む,アクセルペダルを踏むといった操作はPro-SiVIC 内の車両モデルに対してフィードバックすることになります。
MATLABの場合,これらのデータのやり取りはworkspace 変数を介して行うことになります。
