

Pro-SiVIC
- 2016/03/08
Pro-SiVIC 走行環境(insrustructure)内の車両(vehicle)モデルへのセンサ追加は以下の手順で行います。
1. センサモデル追加

この時点ではセンサはinfrastructure原点にデフォルトの方向で配置され,車両モデルに搭載されていません。
2. vehicleの子オブジェクトとする
センサを車両(vehicle)の子オブジェクトにすることで車両に関連付けがなされます。
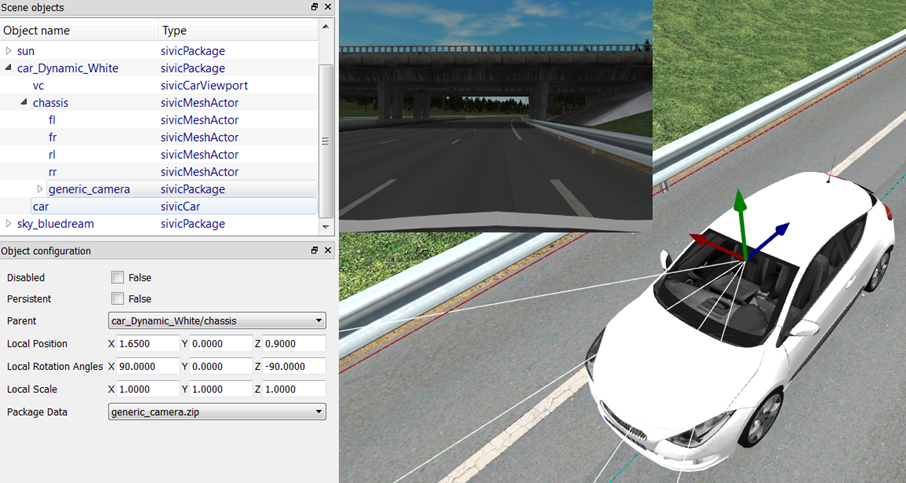
3. センサ位置,方向調整

車両とセンサの関連付けが行われただけではセンサは車両中心に配置されていますので,位置と方向を調整する必要があります。
4. センサ特性パラメータ変更
センサの各パラメータは事前に校正(calibration)しておく必要があります。
