

機能
- 2015/09/21

Pro-SiVIC はイメージセンサモデルにおいて以下のフィルタを適用できます。
今回は天候条件に関連した Fog / Rain フィルタに関してご説明いたします。
カメラモデルで利用可能なフィルタ一覧
- Fog (霧)
- Rain (雨)
- DOF (Depth of Field, 被写界深度)
- Distortion (ひずみ)
- Vignetting (口径食)
- Blur (ぼかし)
- Motion (ぶれ)
- Blooming (にじみ)
- Sensitivity (感度)
- Noise (ノイズ)
- AE(Auto Exposure)
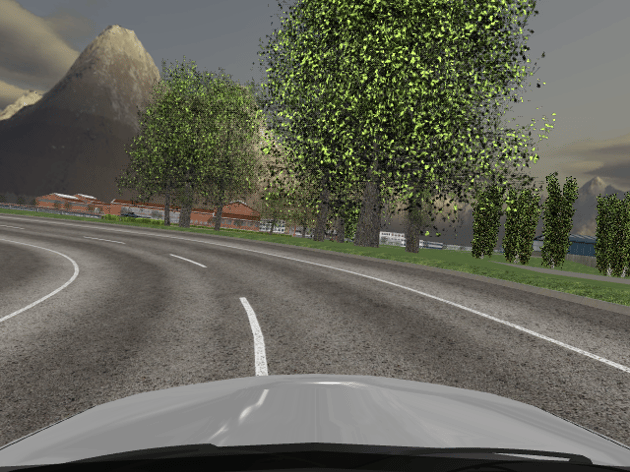
Fogフィルタ
Pro-SiVIC 上の仮想走行環境に霧が発生した状況を再現します。設定パラメータとして霧の濃さ(density)と光度(luminosity)があります。
霧あり

霧なし
Rainフィルタ
降雨の影響を考慮しイメージセンサ出力画像を生成します。雨滴のサイズ/拡散方向/テクスチャ変更が可能です。
Weather Manager
各車両モデルに搭載したイメージセンサ毎に Fog / Rain フィルタ設定が可能ですが,センサ毎に設定変更する作業が煩雑なため,Weather Manager で シミュレーションモデル全体に対して Rain / Fog 設定を一括適用可能です。
次回は DOF (Depth of Field, 被写界深度)フィルタに関して解説いたします。
